|
辅助系统需要经过严密的测试才能最终投产,虽然工程师已经开始着手测试系统性能,但验证它可能需要数十年的时间。一是由于系统需要适应大量不同的路况,二是要保证在不同情况下的安全性。之所以达不到L5,就在于五年后我们不能保证系统能搞定任何环境设施和特征。 2)全自动驾驶?十年内看不到 鉴于目前的发展趋势,未来十年之内达不到全自动驾驶水平。 现在,硬件的发展水平已经快要满足自动驾驶的需求了,CPU和GPU也可以提供足够的计算力。所以,实现L5级别无人车的障碍,主要是开发所需的软件系统。
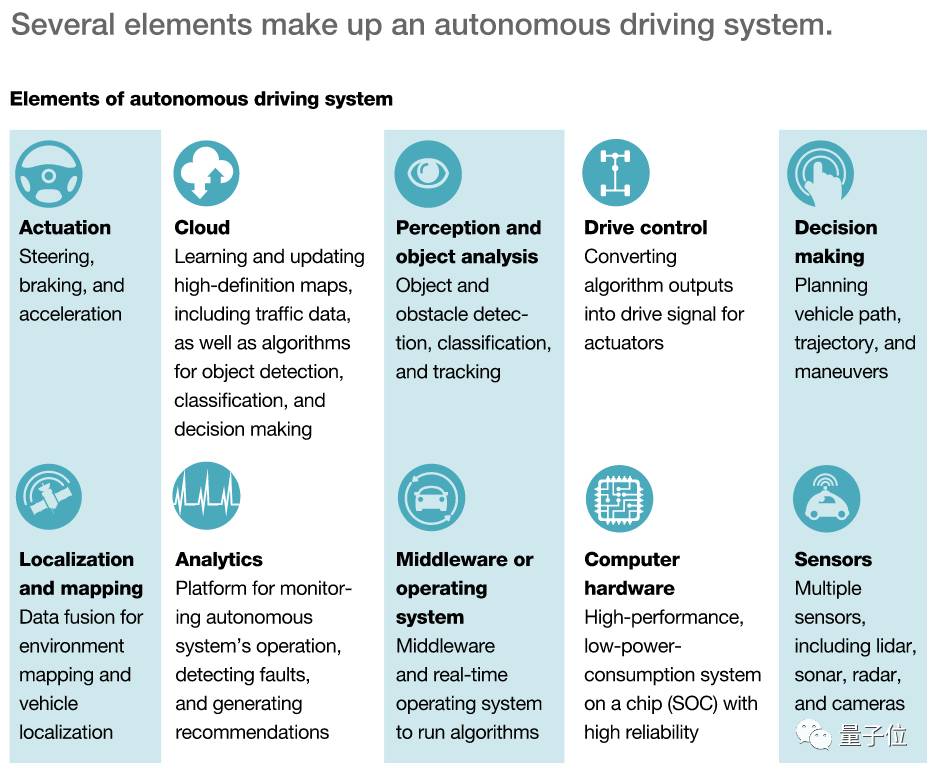
在上面麦肯锡报告图中我们可以看到,自动驾驶汽车的传感器需要包含许多功能,如全球定位系统(GPS)、激光雷达、摄像头、雷达、红外传感器、朝圣传感器、专用短程通讯DSRC、惯性导航系统INS、预先构建地图、测距传感器等。 3)直面系统软件问题 对于软件系统来说,以下三个问题亟待解决: 首先,无人车需要一个更好的人机交互界面,也需要更好地协调与其他无人车之间的关系。 其次,需要建立更好的无人车决策机制,让它们学会协调多种情景,执行不同的任务。 最后,我们还呼吁建立一个故障安全机制,在无人驾驶系统失效时也不会让乘客陷于危险之中。 这三个问题对现在的无人车系统来说是不小的挑战,也需要用冗长的时间进行测试。 3. 全面自动驾驶需要解决的问题 无人车在上路之前,需要解决的问题可不少。自驾系统需要考虑的要素有很多,包括分析、决策、定位、感知等方面的因素。
1)自驾系统三要素 在所有这些要素中,感知、地图构建和定位是最受研究人员关注的。 感知的目标是以最少的测试和里程实现可靠的感知水平。依靠雷达、声纳和相机感知环境中的其他车辆和物体。 而地图构建的两大方向又包括构建高清全景地图和构建特征地图。前者是为了使车辆沿着目标线路行进,后者使为了通过道路特征得以导航。 定位是通过识别车辆在其环境中的确切位置,有效决定去哪里该如何导航的关键步骤。这个也不难理解,目前手机上的各种地图一般均有定位功能。 2)决策系统 上述的必要因素如同人体内的器官,具备了这些器官人类得以生存,无人车具备了上述的要素也就具备了自动驾驶的能力——但是,人类还需要一个大脑指导行动,无人车当然也需要一个决策系统确定最终的行进路线。 全自动驾驶汽车可以为每一英里的旅行做出成千上万种决定,这种行为就叫做决策。目前构建决策系统可以有三种方法: 一是构建神经网络; 二是基于规则的决策,程序员需要输入进所有的if-then规则的组合; 三是混合决策法,程序员通过引入特定的神经网络来解决由集中的神经网络连接的单个进程,从而解决神经网络固有的复杂性,之后用规则进行补充。 在上面的三种方法种,混合统计法是当今最流行的一种决策方法。 3)测试和验证 自驾测试是公认的冗长的过程。工程师要把开发的无人车暴露在不同的路况下完成数万英里的行驶里程,来确定系统是否在按照安全的预期运行。这个“数万英里”的里程绝对不是好跑的——研究表明,无人车需要跑出2.75英里才能保证95%的决策正确率,而95%的概率离上路水平还远远不够。所以我们推测,假设无人车可以上路,大概需要跑出数十亿英里数。 为了更直观地表明这个概念,我们来做一道算数题。假设有100辆无人车每天24小时不停运行,每年365天,平均时速25英里,那么,需要十多年的时间才能跑完2.75亿英里。 所以,我们还需要一个虚拟的模拟环境,将现实世界的路测与虚拟模型结合,通过构建不同情况的模拟算法来证明无人车在不同情况下能够做出正确决定。 这种测试方法不仅降低了检测成本,j2直播,更是大大节约了检测时间。 4. 让无人车来得更快一点 通过上面的分析我们可以发现,无人车的研究时间非常之久。但其实也不是不能将这些时间压缩。 (责任编辑:本港台直播) |