|
美国建筑师William McDonough说:“污染是设计(与制造)失败的标识”。目前,从组件到系统,满足自上而下需求的制造业需要进行全面的重新构想。制造业对于减少废弃物的解决方式绝大部分是针对于生产过程中产生的废弃物、可利用废弃物以及在停工和维护时产生的废弃物。我们针对绿色制造业的路线图着眼于所有组件及系统在整个生产过程中的回收利用,其过程包括从原材料的开采与加工,到产品制造与分发,到最后材料的回收。为了能够达成逐步的改变,我们必须引进新的制造业技术且新产品的设计也必须遵循绿色制造这一目标。比如,向增材制造过渡将会极大地减少产品或零件生产中产生的废料。新的物流系统也需要具有广泛的回收能力。目前,物流系统很难回收那些制造企业无法回收或其本可以进行回收但不回收的材料。我们非常关注制造业基础设施的重用、原材料的回收、每一个制造环节里对能源使用的最小化以及为生产新产品对子系统进行重新设置。
类人的灵巧操作技术 机器人手臂与手掌的灵活度最终将超越人类。在速度与强度方面,这已经是既成现实。然而,与机器人对手相比,人类的手在完成那些需要高灵巧度方面的任务时仍然具有优势。这种差距归因于机器感知、可靠的高保真传感器以及规划与控制等关键技术。机器人的灵巧操作技术路线图包含以下的技术节点:
基于模型的供应链整合与设计 目前,计算机领域与信息科学的发展使将物理制造过程模型化、使研究人员“将图灵机带进制造业”成为可能。如果完成此项技术,制造业会像数据库及计算机一样蓬勃发展,使系统与组件具有互操作性,产品具有更高的质量、更好的可靠性、更低的成本以及更快地进行交付。所以,基于模型的供应链整合与设计路线图具有以下的技术节点:
纳米级制造 经典的基于CMOS的集成电路与计算模式正被新的纳米级制造与计算技术超越。我们已经看到了非硅微系统技术以及使用自然界中观察到的合成技术进行构建的新方法的成长与发展。微机电系统(MEMS)、低功耗超大规模集成电路以及纳米技术的发展已经使次毫米级自供能机器人的出现成为可能。新的并行甚至随机装配技术有望出现。传统的制造方式将被新的、目前只存在于想象中的纳米级制造方式所取代。故纳米级制造以及纳米机器人技术必须强调其基础研发:
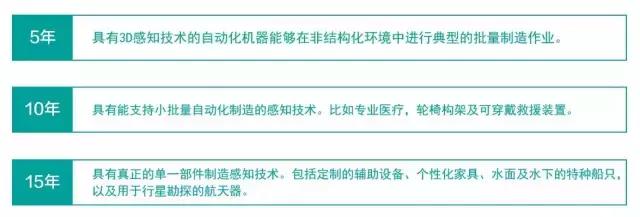
非结构化环境感知技术 在自动化制造业中,固定的自动化设备已被证明更加易于进行大规模生产。除了一些特定应用之外,柔性自动化技术以及大规模定制自动化技术的前景并未受到关注。造成这种现象的主要原因之一是固定的自动化设备为自身构建了一个结构化的环境以极大地简化“智能”制造所面临的挑战。小批量的自动化制造要求机器人更加智能、灵活,并能在与人类工人共同工作的低结构化环境中安全地运行。比如,在产品流层面,机器人及其他机器设备需要在各种不同的地点进行工作,以完成对产品(比如一辆飞机或一艘轮船)的制造,而在功能层面,则是产品在各种机器设备间进行运动。单一部件制造的挑战性加剧了上述困难。感知技术的路线图包含以下技术节点:
与人类共事的内禀安全机器人:机器人大众化 现在有很多关于内禀安全机器人的讨论,这些讨论并不只是局限于“内禀安全”这个词汇的具体含义。“内禀安全”的设备被定义为“在正常或异常条件下,在某种特定危险气体最易被点燃的情况下,无法释放出足够将其引燃电能或热能的设备或布线”。简而言之,一台“内禀安全”的设备无法引燃可燃气体。“内禀安全”的要求显然也需要像其他被设计用制造业领域的机器一样,在机器人系统中得到重视。虽然显而易见的是“内禀安全”会为机器人的行为带来更多负担,但也许这更关系到“内禀”这个词本身的定义。 (责任编辑:本港台直播) |