|
科学家们对机器人领域的关注久畅不衰,近期仿生软体机器人更是机器人领域的一大创新。与传统钢铁机器人不同,软体机器人采用仿生学原理设计,不仅可以作出扭曲、弯折等动作,甚至还可以抓起自身重量100多倍的物体。虽然软体机器人很强大,但是它的复杂运动一直是科学家所面临的一个大难题。近日,北卡罗莱纳州立大学的一个小组的科学家们提供一个有趣的方案,利用磁场来控制仿生机器人的移动。它的原理是使用装有铁微粒的聚合物薄膜来覆盖机器人,这些微粒由磁场制成平行链,在引导机器人时,atv,只需要将相关组件对准磁场,通过改变磁场的方向和强度来控制机器人的动作选择。
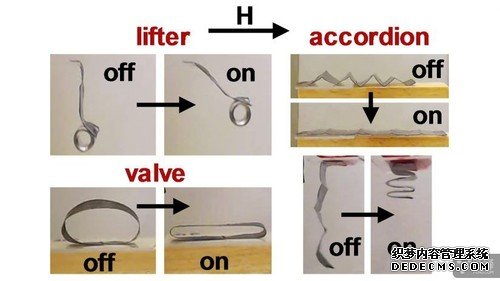
科学家们采用这种磁场操控的方法制造出了三种机器人。一个是可以承载其重量50倍的悬臂机器人(Lifter),第二种是可以像肌肉一样扩张和收缩的手风琴机器人(Accordion),第三种阀门机器人(Valve)可以通过挤压发挥泵的作用。
Valve ?
Accordion 毫无疑问,这种方法要运用在真正的机器人身上可能需要很长时间。不过,技术的潜在的用途已经很容易看到。就比如手风琴机器人和阀门机器人对于那些仿人型机器人特别有用,更不用说假肢、植入物和其他保健设备了。软体机器人相比较更加传统的机器人来讲,拥有更多的内置优势。他们更加的便宜,更加柔软,而且和他们的前辈们比较,人机交流更加安全。相信在将来软体机器人会更快普及到多方面领域。 阅读全文 news.zol.com.cn true 中关村在线 report 1143 科学家们对机器人领域的关注久畅不衰,近期仿生软体机器人更是机器人领域的一大创新。与传统钢铁机器人不同,软体机器人采用仿生学原理设计,不仅可以作出扭曲、弯折等动作,甚至还可以抓起自身重量100多倍的物体。虽然软体机器人很强大,但是它的复杂运动一直... ,j2直播 (责任编辑:本港台直播) |