|
【新智元导读】2016年“中国智能车未来挑战赛”13日在江苏常熟顺利落下帷幕,经过激烈比拼,来自军事交通学院的“军交猛狮2号“和“军交猛狮1号“综合成绩分列第一、二名。挑战赛分为城区道路和高速道路两部分,模拟现实道路设置多重障碍,包括 U-turn,识别红绿灯,识别假人,躲避静止车辆,换道超车等等,本文对挑战赛的各科目作了2016/1104/165628.html">详解。 2016年第八届“中国智能车未来挑战赛”11月10日-13日在常熟举行,来自国内各高校、科研机构和企业的23支车队亮相本次赛事。经过激烈比拼,来自军事交通学院的“军交猛狮2号“和“军交猛狮1号“综合成绩分列第一、二名。以下是高速道路和城区道路的具体得分情况。
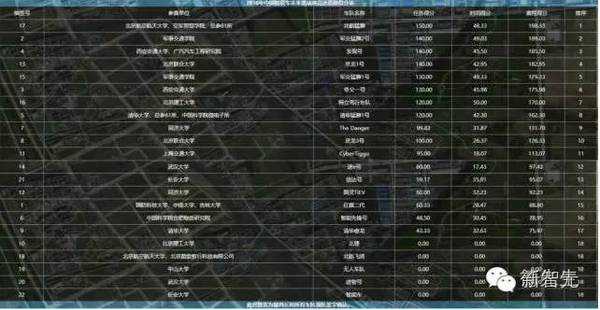
2016年中国智能车未来挑战赛高速道路得分表
2016年中国智能车未来挑战赛城区道路得分表 对于智能车比赛,很多人都不是很了解。这个是和一般车一样比速度吗?其实并不完全是这样,比赛中分为城区道路和高速道路两部分,城区道路比高速道路路况要复杂的多,据悉,“模拟现实道路”比赛的九宫格赛道中间设置了多重障碍,今天就让我们一起来了解一下吧! 启动发车
这是智能车比赛的起点,首先组委会将路网文件发给各参赛车队,智能车所要做的就是解析路网文件,等待并识别前方红绿灯的指令,绿灯一亮智能车就会自动识别并且发车。 U_turn
起点出发后第一个任务点就是U-turn,智能车需要对路标进行识别,识别后进行路径规划。这就需要车载摄像头数据和雷达数据进行很好的融合,车辆控制也不能出现偏差,对智能车要求还是很高。 识别红绿灯
红绿灯识别对于智能车来说非常重要,它是智能车能否上路的重要基础部分。各个车队都有自己的识别方法,大部分车队用摄像头来识别,在识别算法上又有很大区别,有简单用色差识别,有的则使用深度学习这种“时髦”的算法,方法不同,各个车队所表现出的效果也尽不同。 横穿道路的假人
在这个地方,假人前方,需要车辆进行刹车,等待假人“穿过”马路,才可以通过。其实这个科目的难度其实并不大,车辆前进过程中,假人在路中间,顶在智能车头顶上的雷达,可以轻松的识别并且等待它离开,然后通过。 人行道假人
形象逼真的假人,走过人行横道。同样要求车辆对其进行识别并且刹车。相比于横穿道路的假人,这个科目的难度就比较大了,它需要车辆来识别人行横道,然后判断人行横道两侧是否有人需要通行,等待判断时间过后确认没有行人通行后他才会继续前进。 模拟隧道
隧道内部光线微弱,对于通过摄像头来识别道路边线的车队,这是很大的挑战。同时在隧道内GPS引导也会丢失,这也就模拟了车辆在高架下和隧道内丢失GPS的情况,考察了车辆在无GPS引导时路径的推断能力。 隧道内白板
隧道内设置了“白板”障碍物。对于白板的设计,在现场观赛的中国工程院院士李德毅提到,主要是受今年上半年在美国发生的特斯拉汽车在自动驾驶模式下撞上白色大卡车这一事故的启发,考察摄像头和激光雷达的识别能力。 躲避静止车辆
|