|
MR.城堡最近一直在赶书稿,五月份和机械工业出版社签合同的时候还感觉截稿日期还遥不可及,眨眼之间是大半已过,人生短暂,早晨发芽生长,晚上割下枯干,诚如是也。 还好书稿已完成70%左右,但专栏文章很多内容都写到书稿里去了,因此好久没能够更新,未来会根据大家的需求在专栏中放出一些内容,如果大家有自己希望了解的无人机内容,却还没有在专栏文章或Live中出现,也可以私信MR.城堡,我会在Live或未来的书稿中认真考虑各位朋友的建议并有针对性的进行准备。
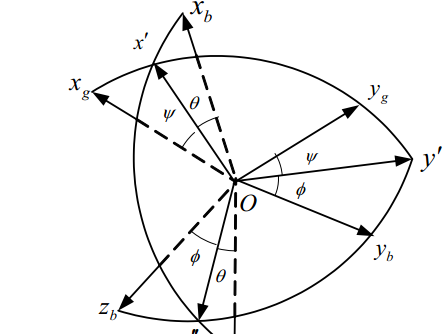
熟悉无人机的朋友一定常常听到姿态,直播,这两个字,无人机工程师一定觉得这实在太熟悉了,方位余弦,四元数,可能有些朋友也用过指数表示方法。Ok,这些内容确实不难,本文也会直接给到大家相关公式,可以拿来在程序中直接使用。但MR.城堡不知道各位有没有过滤过这些问题:无人机为什么需要姿态描述?旋转为什么有三个呢?为什么耦合不直接用自由度表示出来呢?为什么要12个状态(说15个状态的朋友,线性加速度也放了进去,后文将告诉你这是不必要的),未来有没有可能需要更多状态?这些姿态表示方法有什么区别?有没有其它姿态表示方法呢?什么叫做万向节锁死呢?为什么锁死就控制不了?等等 这些问题有些工程师可以凭直觉得到答案,有些比如未来是否需要更多状态?为什么选择某一种姿态描述方式?万向节锁死的本质解释,以及不能控制的原因?等等,可能就会比较吃力,直播,然而这些却很重要,当我们把这些理论与无人机系统实物联系起来时,不但可以用更低的成本,做出更好的产品,更能丰富我们对无人机的理解,形成对技术和趋势的预判。
通过前面的专栏文章:城堡里学无人机:无人机导航之玩转坐标系,城堡里学无人机:如何处理GPS数据获取无人机状态信息?,我们知道无人机如何获取位置和速度状态,并转换到NED坐标平面内。但这并不足以让我们全面了解无人机的运动情况,换句话说,相同的位置中,无人机可能有不同的运动姿态。举例来说,一架多旋翼无人机在不同时间经过位置:P=[X,Y,Z]时,前一次为水平飞行,后一次为垂直飞行。虽然位置坐标相同,但运动方式却如此不同。这时我们需要一些额外的信息才能够精确描述无人机的飞行状态,这也就是本文所涉及的内容:无人机姿态。 上面是用一个简单的例子说明一下,但不具有普遍性,下面从理论上浅析一下为什么外环信息出来了还要内环姿态。 多旋翼无人机的姿态可以通过机体坐标系和NED坐标系之间的关系来进行定义。在多旋翼机型介绍中,大家已经了解了多旋翼无人机的姿态控制方式。很容易看出多旋翼无人机具备六个自由度(Degree of Freedom, DOF),沿机体坐标系三轴的线性运动以及绕机体坐标系三轴进行的旋转运动。 然而很容易看出来的内容,想搞清楚why却往往并不容易。 关于自由度,在结构力学或者分析力学中,它的定义是:确定一个体系的位置所需要的独立坐标的个数。物理有的时候比较抽象,大家可以直接通过线性代数里的线性空间来理解,线性空间中我们说到一个子空间,它的维度(Dim)就是张成(Span)这个空间的一组基(Basis)中相互独立向量的个数,我们可以在这里将dimension和DOF等同起来。因此,力学中的“独立坐标”,可以理解为“相互独立的基向量”。有兴趣的朋友可以结合流形,微分同胚来理解(当然,对于工程师而言,还是可以直接转换到矩阵变换的范畴内) 在无人机中有6个自由度,意味着我们需要六组基坐标来描述它的完整位置,这六组基就是无人机所在的R^3空间中的三个坐标轴,以及围绕三个坐标轴的姿态角。从位置到运动,就是导数了,这时6*2=12个状态。我们并不需要更多的向量来描述无人机位置,因此也不需要更多状态来描述无人机的运动,虽然有时候为了方便实现某些功能,或者扩展我们对于“运动”的理解,我们想要控制它的受力状态,我们会增加一些控制行为,比如针对加速度的控制,但这些变量不是描述无人机运动所必须的。
姿态的英文词汇有两个“attitude”或者“orientation”后者的意义更为明显,可以理解为“取向”“指向”,常用于卫星姿态描述中。 (责任编辑:本港台直播) |