|
本文编译自Voyage,作者是Oliver Cameron,他是Udacity前副主席,创办了自动驾驶公司Voyage,并任职CEO。Voyage已经取得了加州车辆管理局(DMV)的路测许可,是无人驾驶领域的新星。该文详细介绍了激光雷达作为无人驾驶关键核心零部件的重要性和原理。
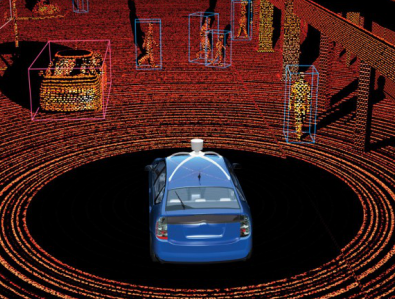
图:voyage 最近,我们在Voyage 上分享了一些关于Homer的新闻,它可是我们的第一辆无人驾驶出租车。为了更好地来实现理解和导航的目的,我们给Homer配备了全方位的传感器,而其中起关键作用的就是LIDAR(激光雷达)。而在接下来的这篇文章中,你将会了解更多有关LIDAR的信息——它在无人驾驶汽车领域的起源,以及它是如何与其他传感器堆叠的。好吧,我已经迫不及待地想和你们分享了…… “超能力” LIDAR可以使无人驾驶汽车(或任何机器人)能够用一些“超能力”来观察世界: 持续360度的能见度:想像一下,如果人类的眼睛可以全天候的看到四面八方。 精准的深度信息:假设,而不是猜测,开奖,你总是可以知道与你相关的物体的精确距离(精度为±2cm)。 如果你曾经看到过一辆无人驾驶汽车,那么,你很有可能已经看到了一个LIDAR传感器。通常,它就是一个安装在车顶上并在不断旋转的大块头盒子。就像下图中,在百度无人驾驶汽车上的那样。
图:百度研究院 市场上最受欢迎的LIDAR传感器之一是高功率Velodyne HDL-64E传感器。下图就是安装在Homer上的Velodyne HDL-64E传感器。
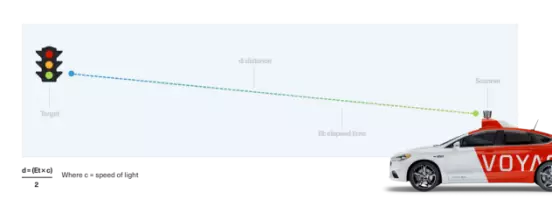
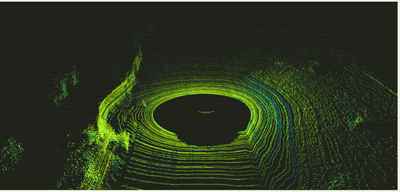
图:voyage LIDAR如何工作的? 一个具有360度视觉和准确深度信息的传感器是如何工作的呢?简单地说:激光雷达传感器不断地发射出激光光束,然后测量出光线返回传感器所需要的时间。
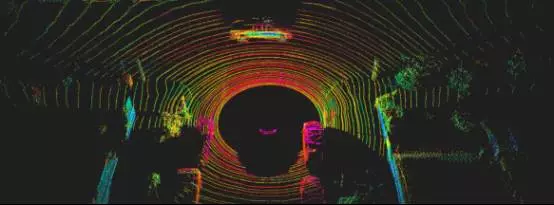
通过每秒发射数百万光束,来自LIDAR传感器的测量能够实现真正3D世界的可视化。通过它,你可以推断出你周边任何物体的精确测量值(可高达约60m,这取决于你选择的传感器)
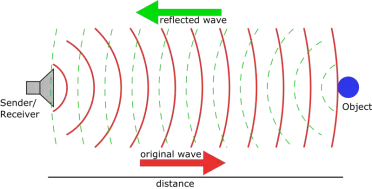
激光雷达的简史 如果你想要了解为什么如今的激光雷达工具受到那么多的拥护和支持,那么,很重要的一点就是要看看其他有着类似目标的类似技术。 ·声纳 可以这样说,最原始的深度感知机器人是蝙蝠(5000万年前!)。蝙蝠(或海豚等)能够使用回声定位来执行与LIDAR相同的功能,也称为声呐(声音导航和测距)。声纳使用声波来测量距离,而不是像LIDAR那样测量光束。 历经5000万年的生物排他性,随着潜艇战争的到来,第一次世界大战推进了人造Sonar传感器首次大规模部署的时间表。声纳在水中表现非常出色,在水中,声音的传播要比光或无线电波更好(这个我们稍后详细介绍)。而目前,声纳传感器主要用于汽车行业,最主要的是以传感器的形式。这些短距离(约5米)的传感器能够以便捷的方式了测量出你的车与后面墙之间的距离。可是声纳没有被证明能够在无人驾驶汽车需求的种类(60m以上的距离)上工作。
在这种情况下,蝙蝠既是发送者也是接收者 ·雷达 (责任编辑:本港台直播) |