|
智东西(公众号:zhidxcom) 文 | 四月 近日,2016世界机器人大会在北京举办,除一众机器人产品展示外,RobCop挑战赛等机器人大赛也在如火如荼的举行。其中英特尔感知计算中国区总监汤振宇作为同期演讲嘉宾、RobCop挑战赛合作伙伴英特尔代表来到现场。会场间隙,智东西的老朋友汤振宇与我们一同聊了聊,英特尔RealSense(实感技术)3D摄像头模块在机器人应用中的最新进展,以及备受业界关注的视觉芯片初创Movidius收购案。 一、RealSense实感技术在机器人上的最新应用
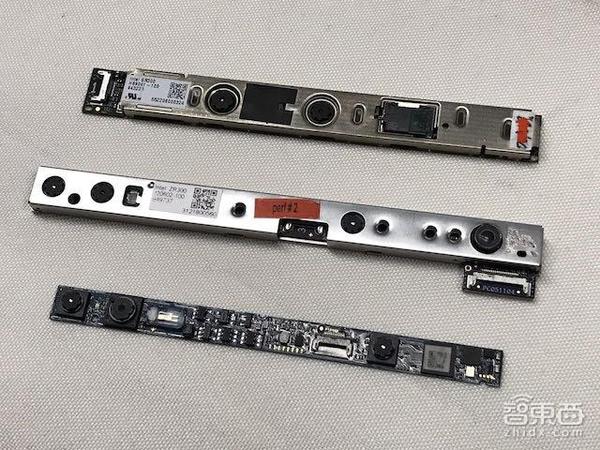
(上图中,从上至下依次是SR 300、ZR 300、LR2oo模块) 自2014年发布以来,英特尔一直在大力推行其RealSense 3D摄像头及背后感知计算,几乎在每年的IDF(英特尔信息技术峰会)上都能成为主角。当然,atv,我们最为好奇的还是最新进展。 汤振宇就RealSense的应用领域、功能实现两方面进行了介绍。在合作伙伴方面,“需要用到视觉功能的产品,都有可能用到RealSense技术”,汤振宇表示,近期英特尔的合作重心从传统的PC、平板、手机3C类产品,向智能硬件领域开拓,“包括机器人、无人机、VR/AR、MR(融合显实)、智能家居等”,汤振宇介绍。 在技术与功能层面,进展主要体现在ZR300模块上,通过结合软硬件的最新技术,可实现即时定位与地图构建(SLAM)。该技术是机器人、无人机等实现自主移动功能的关键。此外,在人物识别方面,加入了身体姿态识别、表情识别、物体识别等更丰富的内容,“机器人能够识别准确物体是很有意义的事,意味着用户可以自定义/自动标识物体。”汤振宇介绍。 二、RealSense与激光雷达应用的区别 实际上,在RealSense推出SLAM技术前。现阶段的机器人产品,如扫地机器人等主要应用激光雷达三点测距的方式,辅以红外光技术进行实时建模扫描。那么,英特尔的RealSense建模与传统的激光雷达有何不同? 汤振宇解释,区别主要在与建模信息的丰富度上,传统的激光雷达扫描只能建立二维图像信息。如扫描一张桌子,安装在机器人底盘的激光雷达只能扫描到桌子腿,获得的信息只是两维的切面;RealSense3D摄像头模块可捕捉到三维的内容,能识别到桌面等信息。 当然,由于模拟人眼成像原理,采用“红外结构光+单目视觉”设计,RealSense模块会收到接收距离、光照强度等环境因素的影响。 三、收购视觉芯片初创Movidius的进展 在无人机避障这件事上,主要以大疆Phantoma4、昊翔(Yuneec)Typhoo H两款机型为代表。其中Typhoo H采用了RealSense的LR200模块,Phantom4引用的则是美国视觉芯片公司Movidius的技术。 那么两者在适用领域上有何差异呢?汤振宇表示因为二者存在竞争关系,故不方便评论。 据智东西(公众号: zhidxcom)了解,RealSense模块由于“红外结构光+单目视觉”技术,属于主动视觉,理论上易受到强光的干扰,故更适合于室内暗环境、普通光照强度环境下。Phantom4所采用的是“RGB双目视觉+超声波”技术,更适合光照清晰、色彩鲜艳的图像和环境。 不过,两类技术的界限或许将在不久后被打破。今年9月份外媒消息,英特尔已达成对Movidius的收购,具体交易价格并未透露。对于两类技术的融合及后续发展,汤振宇表示,英特尔对于Movidius的收购案法务部分还在进行中,收购完成后Movidius将会并入到英特尔感知计算群部门。两类技术存在融合的空间。 英特尔方面也曾表示,Movidius更为高效、低功耗的芯片处理方案将运用到包含RealSense 3D深度摄像头的硬件设备中,帮助英特尔发展无人机、机器人、虚拟现实头显等新兴市场。
此外,现场还展示了今年IDF上曾推出的售价245美金的机器人开发套件,据汤振宇表示,该开发套件现已实现量产,可直接连接RealSense模块使用。
|